Linear Programming Code
All the code is written in matlab. Please visits here for a complete version of my code. The code base is in reference to Dr. Chunming Wang's MATH467 project code.
1. Implementation of the basic simplex algorithm
Code
function [Solution,BasicVar,Status] = AxEqualsb(A, b, c, BasicVariables)
[rows, ~] = size(b);
if (all(b >= 0) && rank(A)==rows)
[Solution,BasicVar,Status]=basicsimplex(A,b,c,BasicVariables);
else
disp('b must be nonnegative and rank(A) == size of b');
end
end
Interpretation
- The function works for Contraint .
- It checks whether is non-nagative using
all(b >= 0). - It also checks the matrix is full rank using
rank(A)==rows. - If all the inputs are valid, we feed all the parameters into the
basicsimplex()function and return the results.
Results
I use the following code to test the algorithm. I set A = [[1,0,1];[0,1,1]], b = [1;2], and c = [-1;-1;-3].
The result I expected to get is [0;1;1].
Running this to test:
A = [[1,0,1];[0,1,1]];
b = [1;2];
c = [-1;-1;-3];
[Solution,BasicVar,Status] = AxEqualsb(A, b, c, [1, 2])
Solution =
0
1
1
BasicVar =
3 2
Status =
0
We can see the basic variables are and with values and respectively. Status = 0 showing the results are valid.
2. Implementation of general linear programming algorithm
Code
function [Solution,BasicVar,Status] = AxSmallerThanb(A_hat, b_hat, c_hat)
[rows, ~] = size(b_hat);
if (all(b_hat >= 0) && rank(A_hat)==rows)
I = eye(rows);
c_new = [c_hat;zeros(rows,1)];
A_new = [A_hat I];
[~, A_cols] = size(A_hat);
BasicVariables = (A_cols+1):(rows+A_cols);
[Solution,BasicVar,Status]=basicsimplex(A_new,b_hat,c_new,BasicVariables);
else
disp('b_hat must be nonnegative and rank(A) == size of b_hat');
end
end
function [Solution,BasicVar,Status] = AxGreaterThanb(A_tilda, b_tilda, c_tilda)
[rows, ~] = size(b_tilda);
if (all(b_tilda >= 0) && rank(A_tilda)==rows)
I = eye(rows);
A_phaseII = [A_tilda -I];
c_phaseII = [c_tilda;zeros(rows, 1)];
A_phaseI = [A_phaseII I];
[~, A_cols] = size(A_tilda);
PhaseI_BasicVariables = (A_cols+1+rows):(2*rows+A_cols);
c_phaseI = [zeros(A_cols+rows, 1);ones(rows, 1)];
[SolutionI,BasicVarI,StatusI]=basicsimplex(A_phaseI,b_tilda,c_phaseI,PhaseI_BasicVariables);
if (StatusI==0)
% Phase II
[Solution,BasicVar,Status]=basicsimplex(A_phaseII,b_tilda,c_phaseII,BasicVarI);
else
Solution=SolutionI;
BasicVar=BasicVarI;
Status=StatusI;
end
else
disp('b_tilda must be nonnegative and rank(A) == size of b_tilda');
end
end
Interpretation
- The first function
AxSmallerThanb()works for Contraint .- It checks whether is non-nagative using
all(b >= 0). - It also checks the matrix is full rank using
rank(A)==rows. - If all the inputs are valid, we are going to add slack variables to make the problem standard.
- Finally, we feed all the parameters into the
basicsimplex()function and return the results.
- It checks whether is non-nagative using
- The second function
AxGreaterThanb()works for Contraint .- It checks whether is non-nagative using
all(b >= 0). - It also checks the matrix is full rank using
rank(A)==rows. - If all the inputs are valid, we are going to first add slack variables to make the problem standard, and call it
A_phaseII. - Second, we are going to add phase I variables so that we have an intial basic solution.
- Third, change the objective function based on the phase I variables .
- Next, we feed all the parameters into the
basicsimplex()function and return the results. - Then, do phase II simplex method based on the
BasicVarIreturned from phase I. - Finally, the results are returned.
- It checks whether is non-nagative using
Results
I'm going to use the same , , and as part 1.
Running this to test:
[Solution,BasicVar,Status] = AxSmallerThanb(A, b, c)
[Solution,BasicVar,Status] = AxGreaterThanb(A, b, c)
Solution =
0
1
1
0
0
BasicVar =
3 2
Status =
0
Solution =
0
0
2
1
0
BasicVar =
4 3
Status =
-1
- We can see for the first case, the basic variables are and with values and respectively.
Status = 0showing the results are valid. - For the second case, it's straightforward that the solution will be infinity. Indeed,
Status = -1proves that there's no solution for this case.
3. Study of versus approximation
Code
% Part 3 Apple stock vs Dow Jones Index
Apple = readtable('APPL_DATA.csv');
Apple = flipud(Apple);
Apple = Apple(1:253,[1,4]);
Apple = table2array(Apple(:,2));
DowJones = readtable('Dow_Jones.csv');
DowJones = DowJones(:,1:2);
DowJones = table2array(DowJones(:,2));
DowJones = str2double(DowJones);
X = transpose(DowJones)
Y = transpose(Apple)
n = 253;
% L1 Regression
[RegressionModel]=L1_MultilinearRegression(X,Y);
%
% Least square
%
Xhat=X-mean(X,2)*ones(1,n);
Yhat=Y-mean(Y);
Coef_LSQ=inv(Xhat*Xhat')*Xhat*Yhat';
Intersect_LSQ=mean(Y)-Coef_LSQ'*mean(X,2);
Prediction=Coef_LSQ'*X+Intersect_LSQ;
%
figure;
plot(Y,RegressionModel.Prediction,'o','MarkerSize',[8],'MarkerFaceColor','r','MarkerEdgeColor','r');
hold on
plot(Y,Prediction,'o','MarkerSize',[8],'MarkerFaceColor','b','MarkerEdgeColor','b');
%
figure;
plot(Y'-RegressionModel.Prediction,'o','MarkerSize',[8],'MarkerFaceColor','r','MarkerEdgeColor','r');
hold on
plot(Y-Prediction,'o','MarkerSize',[8],'MarkerFaceColor','b','MarkerEdgeColor','b');
RegressionModel.SRE
sum(abs(Y-Prediction))
Explanation
- For this part of the problem, I'm using Apple Stock Price data and Dow Jones Index Price data for the past year.
- First, I read the data from the
.csvfiles and do some manipulations to them to a vector. - Second, I feed both data into
L1_MultilinearRegression(X,Y),Xis Dow Jones data andYis Apple data. This should return a model. - Third, I perform regression on the same set of data.
- Close to finish, I plot the regression model and the residual graph for both types of regression, shown in figures below.
- Finally, I return the sum of residuals for both models.
Results
Figure for regression model:
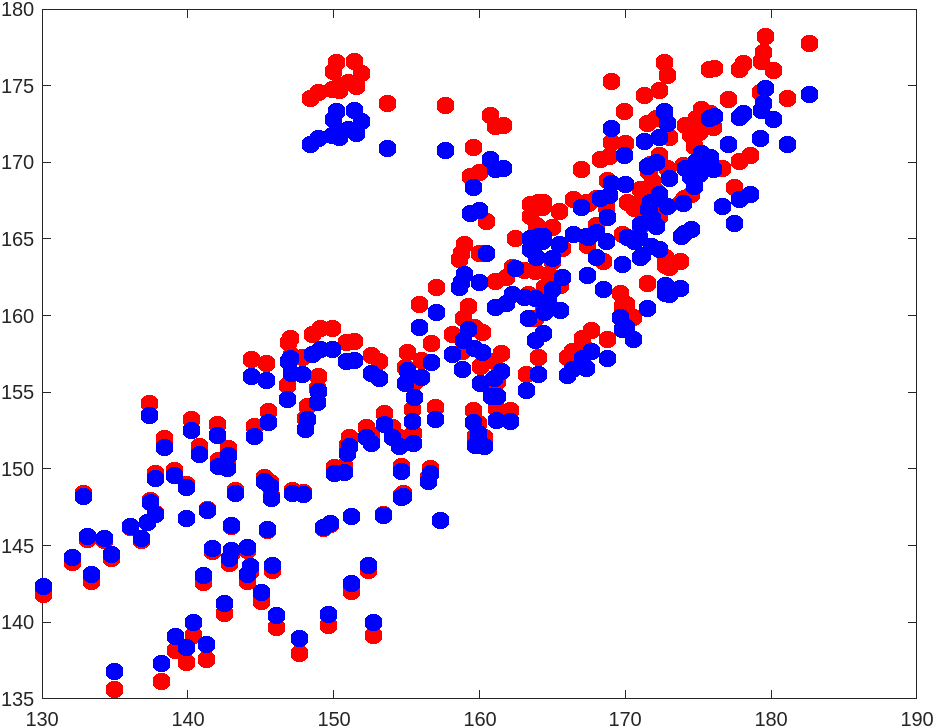
Figure for residual plot:
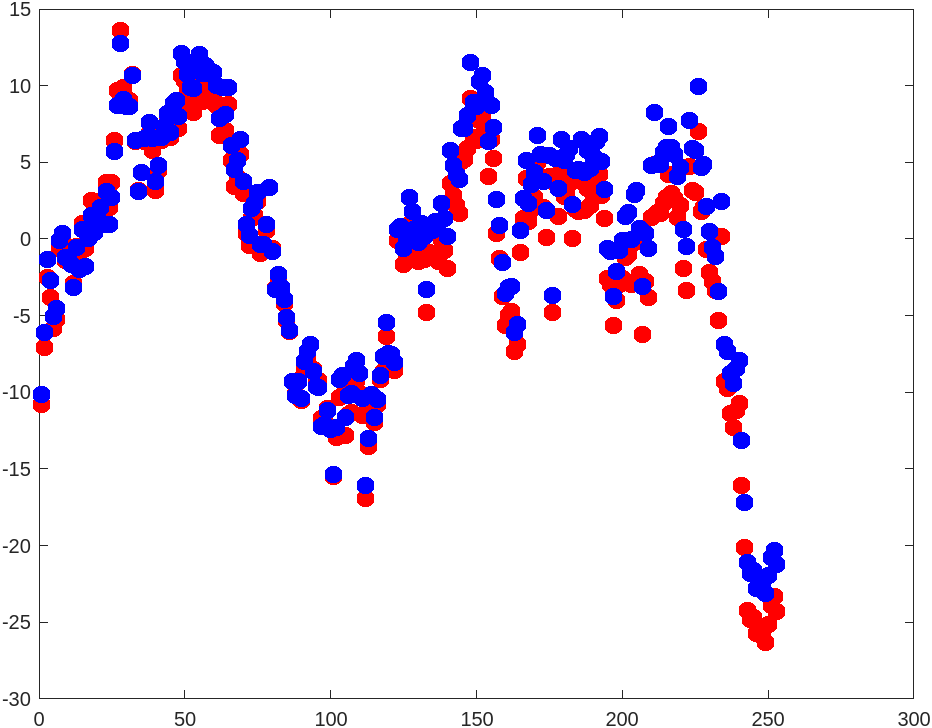
Sum of residuals (first one is for , second one is for ):
ans =
1.5284e+03
ans =
1.5824e+03
Comparison of Results
The sum of residuals is a little higher than the sum of residuals. We also discover that typically guards against severe mistakes. The red dot in the picture above, which reflects predictions, is visible more frequently in areas farthest from . This is due to the tendency of regression to punish extreme spots (projections represented in blue dot).